The best way to illustrate the uncanny valley effect is with an example. So, picture this: it's the year 2053, and you're visiting the doctor's office. Moments after you enter the examination room, a young woman in a white coat steps confidently through the door, smiling and greeting you by name. You're impressed by her efficiency and friendly demeanor. She describes several possible causes of your lingering shoulder pain, but when she places her hands on you to manipulate the joint, her skin is oddly cold.
That's when you notice that her eyes have a glassy sheen and her gaze never quite meets yours. When she turns to ready a machine, you hear the faint whir of electric motors and you come to the eerie realization that you're being examined by an android. She seems so human, but her few details that are inhuman disturb you. Welcome to life in the uncanny valley.
Advertisement
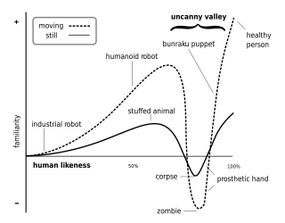
The uncanny valley phenomenon was proposed in 1970 by Japanese roboticist Masahiro Mori, a major figure in the field of robotics. The celebrated robotics professor proposed that we feel greater affinity for artificial humans as they become more realistic, but when they are almost perfectly human, slight differences creep us out, and our affinity for them drops.
Should they appear indistinguishable from true human beings, we would again feel affinity for them. On a graph of affinity versus realism, the drop of affinity resembles a valley. Mori called this pattern bukimi no tani, translated loosely as "the uncanny valley."
In the decades since the uncanny valley was suggested, it has transformed from a philosophical theory to an effect with real consequences. Computer-generated human characters appear in movies, and engineers are constantly developing hyper-realistic androids, the official term among roboticists for humanlike robots.
The day that a humanoid robot helps you at the doctor's office or even lives in your house draws closer every year, and how we interact with and react to simulated humans is quickly becoming more important. Let's take a closer look at Mori's ideas and the factors that cause the effect, and find out how creators can develop artificial beings that fall outside of the uncanny valley (if it even exists at all).
Advertisement