Without a doubt, the HowStuffWorks staff is anxious about the upcoming "Transformers" movie. We don't just wonder whether it will be good. We wonder whether we'll see robots with Transformers' capabilities during our lifetimes. While full-scale Transformers seem a little implausible - and impractical - it turns out that some existing robots have a lot in common with Transformers. In this article, we'll explore what these transforming robots look like, how they work and how they're similar to Transformers like Optimus Prime.
We'll begin with an analysis of Prime himself. He's enormous and impressive, but could he ever be real? To find out, we asked engineer Michael D. Belote what it would take to build a full-scale tractor-trailer that can convert into a bipedal robot. In other words, what would it take to make a life-sized version of Optimus Prime?
Advertisement
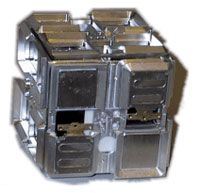
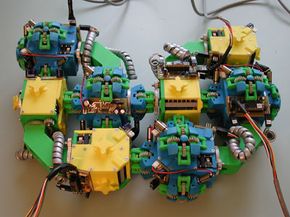
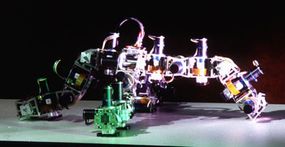
First, Prime has to be a self-reconfiguring robot. Some self-reconfiguring robots, or robots that can change their shapes to perform different tasks, exist today. However, they're very different from Optimus Prime. As Belote explains:
If engineers figured out how to make interchangeable modules on Optimus Prime's scale, it might still be impossible to provide the power to move them. In his vehicle form, Optimus Prime can run on ordinary diesel fuel. But walking is far less efficient than rolling on wheels. In order to walk, Prime would need far more power than a diesel engine could provide. Here's Belote's analysis of how to handle Prime's power requirements:
So hydraulic power might allow Prime to walk, but the hydraulic system itself would create a different set of problems. "A tank or reservoir must be added to hold the hydraulic fluid," says Belote, "hydraulic pumps are necessary; a secondary power source must be used to power the pump; valves are necessary to meet the appropriate pressures and flow rates." In addition, a hydraulically-powered Prime would have to be lined with piping to carry the hydraulic fluid. These pipes, along with Prime's fuel lines and electrical wiring, would have to remain undamaged or even untouched during transformation.
After surviving the transformation to robot form, Prime would then have to walk as a biped. Belote describes what it would take for this to happen: Since traditional semis frequently exceed 30 tons in weight, the final weight of Prime could easily be in the 35 to 40 ton range. Compare this to the world's best "walking" robot, Honda's ASIMO robot, which has a total weight of 119 pounds and yet can only walk for about 40 minutes (electrically powered) and at a max speed of less than 2 mph. The weight ratio for ASIMO is 2.3 lbs per inch, compared to the weight ratio of Prime, which would likely exceed 75 to 80 lbs per inch -- a thirty-fold increase.
In addition, robots cannot easily mimic the motion of walking. "With a robot," Belote explains, "there is a direct command (lift leg 'x' amount, lean forward 'y' amount, extend leg downward 'z' amount, and so on). With humans, however, there is no 'feedback' mechanism - your brain does not constantly communicate to your legs on where to be placed. Instead, you simply lean forward and 'fall,' setting your leg to absorb the shock when your foot makes contact with the floor."
So it's not likely that we could see a working Optimus Prime or robot like him in our lifetimes. But robots that can change their shape or become any shape already exist. We'll look at some of them - and how they compare to Prime - in the next section.
Advertisement