Space Exploration Image Gallery Telescopes come in all shapes and sizes, from a little plastic tube you buy at a toy store for $2, to the Hubble Space Telescope, which weighs several tons. See more space exploration pictures.
Steve Cole/Getty Images
Maybe you've been out looking at the stars in the night sky, searching for constellations; or maybe you've already learned your way around the constellations, and now you'd like to take a closer look -- at objects like the moon, planets or stars -- with the aid of a telescope.
A telescope is a device used to magnify distant objects. There are many types to choose from, and many price ranges to consider. How do you know which one is best for you? How can you be sure that you won't be disappointed when you take your new telescope out to see the stars?
Advertisement
In this article, we will examine how a telescope works, discuss the various types of telescopes and take a look at telescope mounts and accessories.
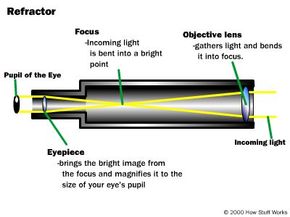
This is the simplest telescope design you could have. A big lens gathers the light and directs it to a focal point and a small lens brings the image to your eye.
A telescope is an amazing device that has the ability to make faraway objects appear much closer. Telescopes come in all shapes and sizes, from a little plastic tube you buy at a toy store for $2, to the Hubble Space Telescope, which weighs several tons. Amateur telescopes fit somewhere in between, and even though they are not nearly as powerful as the Hubble, they can do some incredible things. For example, a small 6-inch (15-centimeter) scope lets you read the writing on a dime from 150 feet (46 meters) away!
Most of the telescopes you see today come in one of two flavors:
The reflector telescope, which uses mirrors instead of the lenses.
Both types accomplish exactly the same thing, but in completely different ways.
To understand how telescopes work, let's ask the following question. Why can't you see an object that is far away? For example, why can't you read the writing on a dime when it is 150 feet away with your naked eyes? The answer to this question is simple: the object does not take up much space on your eye's screen (retina). If you want to think about it in digital camera terms, at 150 feet the writing on the dime does not cover enough pixels on your retinal sensor for you to read the writing.
If you had a "bigger eye," you could collect more light from the object and create a brighter image, and then you could magnify part of that image so it stretches out over more pixels on your retina. Two pieces in a telescope make this possible:
The objective lens (in refractors) or primary mirror (in reflectors) collects lots of light from a distant object and brings that light, or image, to a point or focus.
An eyepiece lens takes the bright light from the focus of the objective lens or primary mirror and "spreads it out" (magnifies it) to take up a large portion of the retina. This is the same principle that a magnifying glass (lens) uses; it takes a small image on the paper and spreads it out over the retina of your eye so that it looks big.
When you combine the objective lens or primary mirror with the eyepiece, you have a telescope. Again, the basic idea is to collect lots of light to form a bright image inside the telescope, and then use something like a magnifying glass to magnify (enlarge) that bright image so that it takes up a lot of space on your retina.
A telescope has two general properties:
how well it can collect the light
how much it can magnify the image
A telescope's ability to collect light is directly related to the diameter of the lens or mirror -- the aperture -- that is used to gather light. Generally, the larger the aperture, the more light the telescope collects and brings to focus, and the brighter the final image.
The telescope's magnification, its ability to enlarge an image, depends on the combination of lenses used. The eyepiece performs the magnification. Since any magnification can be achieved by almost any telescope by using different eyepieces, aperture is a more important feature than magnification.
To understand how this actually works in a telescope, let's take a look at how a refractor telescope (the kind with lenses) magnifies an image of a distant object to make it appear closer.
Advertisement
Refractors
Hans Lippershey of Middleburg, Holland, gets credit for inventing the refractor in 1608, and the military used the instrument first. Galileo was the first to use it in astronomy. Both Lippershey's and Galileo's designs used a combination of convex and concave lenses. About 1611, Kepler improved the design to have two convex lenses, which made the image upside-down. Kepler's design is still the major design of refractors today, with a few later improvements in the lenses and the glass to make them.
Refractors are the type of telescope that most of us are familiar with. They have the following parts:
Advertisement
a long tube, made of metal, plastic, or wood
a glass combination lens at the front end (objective lens)
a second glass combination lens (eyepiece)
The tube holds the lenses in place at the correct distance from one another. The tube also helps to keeps out dust, moisture and light that would interfere with forming a good image. The objective lens gathers the light, and bends or refracts it to a focus near the back of the tube. The eyepiece brings the image to your eye, and magnifies the image. Eyepieces have much shorter focal lengths than objective lenses.
Achromatic refractors use lenses that are not extensively corrected to prevent chromatic aberration, which is a rainbow halo that sometimes appears around images seen through a refractor. Instead, they usually have "coated" lenses to reduce this problem. Apochromatic refractors use either multiple-lens designs or lenses made of other types of glass (such as fluorite) to prevent chromatic aberration. Apochromatic refractors are much more expensive than achromatic refractors.
Refractors have good resolution, high enough to see details in planets and binary stars. However, it is difficult to make large objective lenses (greater than 4 inches or 10 centimeters) for refractors. Refractors are relatively expensive, if you consider the cost per unit of aperture. Because the aperture is limited, a refractor is less useful for observing faint, deep-sky objects, like galaxies and nebulae, than other types of telescopes.
Advertisement
Reflectors
The author's Astroscan 2001 rich-field telescope.
Isaac Newton developed the reflector about 1680, in response to the chromatic aberration (rainbow halo) problem that plagued refractors during his time. Instead of using a lens to gather light, Newton used a curved, metal mirror (primary mirror) to collect the light and reflect it to a focus. Mirrors do not have the chromatic aberration problems that lenses do. Newton placed the primary mirror in the back of the tube.
Because the mirror reflected light back into the tube, he had to use a small, flat mirror (secondary mirror) in the focal path of the primary mirror to deflect the image out through the side of the tube, to the eyepiece; otherwise, his head would get in the way of incoming light. Also, you might think that the secondary mirror would block some of the image, but because it is so small compared to the primary mirror, which is gathering a great deal of light, the smaller mirror will not block the image.
Advertisement
In 1722, John Hadley developed a design that used parabolic mirrors, and there were various improvements in mirror-making. The Newtonian reflector was a highly successful design, and remains one of the most popular telescope designs in use today.
Newtonian reflectors
Rich-field (or wide-field) reflectors are a type of Newtonian reflector with short focal ratios and low magnification. The focal ratio, or f/number, is the focal length divided by the aperture, and relates to the brightness of the image. They offer wider fields of view than longer focal ratio telescopes, and provide bright, panoramic views of comets and deep-sky objects like nebulae, galaxies and star clusters.
A view inside the barrel -- note the primary mirror, and the image of the secondary mirror reflected back onto the primary.
Dobsonian telescopes are a type of Newtonian reflector with a simple tube and alt-azimuth mounting (see "Telescope Mounts"). They are inexpensive to build or buy because they are made of plastic, fiberglass or plywood. Dobsonians can have large apertures (6 to 17 inches, 15 to 43 centimeters). Because of their large apertures and low price, Dobsonians are well-suited to observing deep-sky objects.
The reflector is simple and inexpensive to make. Large aperture primary mirrors (greater than 10 inches or 25 centimeters) can be made easily, which means that reflectors have a relatively low cost per unit of aperture. Reflectors have large light gathering capacities, and can produce bright images of faint, deep-sky objects for visual observing as well as astrophotography. One disadvantage of reflectors is that you occasionally have to clean and align the mirrors. Also, slight errors in grinding the mirrors can distort the image. Here are some of the common problems:
Spherical aberration - light reflected from the mirror's edge gets focused to a slightly different point than light reflected from the center.
Astigmatism - the mirror is not ground symmetrically about its center (it might be slightly egg-shaped, for example); star images focus to crosses rather than to points.
Coma - stars near the edge of the field look elongated, like comets, while those in the center are sharp points of light.
In addition, all reflectors are subject to some light loss, for two reasons: First, the secondary mirror obstructs some of the light coming into the telescope; second, no reflective coating for a mirror returns 100 percent of the light striking it -- the best coatings return 90 percent of incoming light.
Advertisement
Compound or Catadioptric Telescopes
Compound or catadioptric telescopes are hybrid telescopes that have a mix of refractor and reflector elements in their design. The first compound telescope was made by German astronomer Bernhard Schmidt in 1930. The Schmidt telescope had a primary mirror at the back of the telescope, and a glass corrector plate in the front of the telescope to remove spherical aberration. The telescope was used primarily for photography, because it had no secondary mirror or eyepieces -- instead, photographic film was placed at the prime focus of the primary mirror. Today, the Schmidt-Cassegrain design, which was invented in the 1960s, is the most popular type of telescope; it uses a secondary mirror that bounces light through a hole in the primary mirror to an eyepiece.
The second type of compound telescope was invented by a Russian astronomer, D. Maksutov, although a Dutch astronomer, A. Bouwers, came up with a similar design in 1941, before Maksutov. The Maksutov telescope is similar to the Schmidt design, but uses a more spherical corrector lens. The Maksutov-Cassegrain design is similar to the Schmidt Cassegrain design.
Advertisement
Telescope Mounts
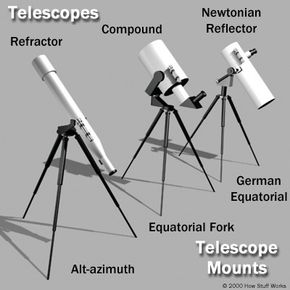
Diagram of telescope types and mounts.
Telescopes must be supported by some type of stand, or mount -- otherwise you would have to hold it all of the time. The telescope mount allows you to:
keep the telescope steady
point the telescope at the stars or other objects (birds)
adjust the telescope for the movement of the stars caused by the Earth's rotation
free your hands for other activities (focusing, changing eyepieces, note-taking, drawing)
There are two basic types of telescope mounts:
Advertisement
Alt-azimuth
Equatorial
The alt-azimuth mount has two axes of rotation, a horizontal axis and a vertical axis. To point the telescope at an object, you rotate it along the horizon (azimuth axis) to the object's horizontal position, and then tilt the telescope, along the altitude axis, to the object's vertical position. This type of mount is simple to use, and is most common in inexpensive telescopes. The alt-azimuth mount has two variations:
ball and socket - used in two inexpensive rich-field telescopes. It has a ball shaped end that can rotate freely in the socket mount.
rocker box - a low center-of-gravity box mount, usually made of plywood, with a horizontal circular base (azimuth axis) and Teflon bearings for the altitude axis. This mount is usually used on Dobsonian telescopes. It provides good support for a heavy telescope, as well as smooth, frictionless motion.
The movement of an alt-azimuth mount in relation to a star.
Although the alt-azimuth mount is simple and easy to use, it does not properly track the motion of the stars. In trying to follow the motion of a star, the mount produces a "zig-zag" motion, instead of a smooth arc across the sky. The zig-zag motion in the figure above is exaggerated and simplified for purposes of illustration; actually there would be more steps, and each step would be smaller. This makes this type of mount useless for taking photographs of the stars.
The equatorial mount also has two perpendicular axes of rotation -- right ascension and declination. However, instead of being oriented up and down, it is tilted at the same angle as the Earth's axis of rotation. The equatorial mount comes in two varieties:
German equatorial mount - shaped like a "T." The long axis of the "T" is aligned with the Earth's pole.
Fork mount - a two-pronged fork that sits on a wedge that is aligned with the Earth's pole. The base of the fork is one axis of rotation and the prongs are the other.
The movement of an equatorial mount in relation to a star.
When properly aligned with the Earth's poles, equatorial mounts can allow the telescope to follow the smooth, arc-like motion of a star across the sky. Also, they can be equipped with:
setting circles - allow you to easily locate a star by its celestial coordinates (right ascension, declination)
motorized drives - allow you or your computer (laptop, desktop or PDA) to continuously drive the telescope to track a star.
You need an equatorial mount for astrophotography.
Telescope Terms
alt-azimuth - type of telescope mount, similar to a camera tripod, that uses a vertical (altitude) and a horizontal (azimuth) axis to locate an object.
equatorial - type of telescope mount that uses two axes (right ascension, or polar, and declination) aligned with the poles to track the motion of an object across the sky.
Advertisement
Eyepieces
View through an eyepiece.Note that the imageis upside-down
An eyepiece is the second lens in a refractor, or the only lens in a reflector. Eyepieces come in many optical designs, and consist of one or more lenses in combination -- they are almost like mini-telescopes themselves.
The purposes of the eyepiece are to:
Advertisement
produce and allow you to change the telescope's magnification
produce a sharp image
provide comfortable eye relief (the distance between your eye and the eyepiece when the image is in focus)
determine the telescope's field of view: apparent - how much of the sky, in degrees, is seen edge-to-edge through the eyepiece alone (specified on the eyepiece; true or real - how much of the sky can be seen when that eyepiece is placed in the telescope (true field = apparent field/magnification)
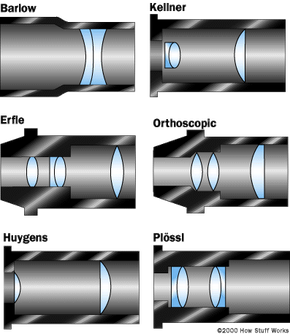
There are many types of eyepiece designs:
Huygens
Ramsden
Orthoscopic
Kellner and RKE
Erfle
Plossl
Nagler
Barlow (used in combination with another eyepiece to increase magnification 2 to 3 times)
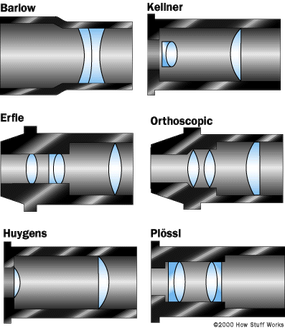
Schematic diagrams of various eyepieces.
Huygens and Ramsden eyepieces are the oldest designs. They suffer from chromatic aberrations and are often included with the least expensive and least effective telescopes.
Orthoscopic eyepieces were invented by Ernst Abbe in 1880. They have four elements and a 45-degree apparent field of view, which is somewhat narrow. The optical design gives a crisp view, has a good eye relief, and is considered excellent for planetary viewing. Orthoscopic eyepieces can range from $50 to $100 each.
Kellner and RKE (Edmund Scientific's patented modification of Kellner) are a three-element design that produce images in a 40-degree field of view, with some chromatic aberration. They have good eye relief. Kellner eyepieces work best in long focal length telescopes. They are a good balance between performance and economy. They vary from $30 to $50 each.
Set of RKE eyepieces.
Erfle eyepieces were invented during World War II. They have a five-element design and a wide, 60-degree field of view. They suffer from ghost images and astigmatism, which makes them unsuitable for planetary viewing. Improvements on the Erfle design are called wide-field eyepieces.
Plossl eyepieces have a four-element or five-element design, with a 50-degree field of view. They have good eye relief (except for 10 mm and shorter lenses). They work best in the 15- to 30-mm size. The quality is good, especially for planetary viewing. They have some astigmatism, especially at the edge of the field. They are popular eyepieces.
Nagler eyepieces were introduced in 1982, advertised as "like taking a spacewalk." They have a seven-element design with an incredible 82-degree field of view. They come in 2-inch barrel size only, and are heavy -- up to 2 pounds (1 kg) -- and expensive.
Barlow lenses can be an economical way to increase magnification and/or provide better eye relief with an existing eyepiece. The eyepiece fits into the Barlow lens, which then fits into the eyepiece holder.
An eyepiece fits into a Barlow lens to increase its magnification.
One final category of eyepiece is the eyepiece with illuminated reticles. These eyepieces come in many designs, and are used exclusively for astrophotography. They aid in guiding the telescope to track an object during a film exposure, which can take anywhere from 10 minutes to an hour.
Advertisement
Finders and Other Accessories
Peep sight
Finders are devices used to help aim the telescope at its target, similar to the sights on a rifle. Finders can come in three basic types:
peep sights - notches or circles that allow you to line up the target
reflex sights - a mirror box that shows the sky and illuminates the target with a red LED diode spot, similar to a laser sight on a gun
telescope sight - a small, low magnification (5x to 10x) telescope mounted on the side with a cross hair reticle, like a telescopic sight on a rifle
Some finders come standard on telescopes, while others are sold separately.
Advertisement
Filters
Filters are pieces of glass or plastic that you can place in the barrel of an eyepiece to restrict the wavelengths of light that come through in the image.
Set of filters for viewing, including a light pollution filter (left) and colored filters for enhancing contrast in planetary images.
Filters can be used to:
enhance the viewing of faint sky objects in light-polluted skies
enhance the contrast of fine features and details on the moon and planets
The filter screws into the barrel of the eyepiece.Completed filter/eyepiece combination.
Dew Caps
Because you will observe during the night, when it may be cool, moisture can condense in your telescope and on the optics. To prevent this, you can use a dew shield, which wraps around the front end of the telescope. The shield extends the length of the tube and allows moisture to condense on the inside of the shield rather than in the tube. Some shields can be heated to prevent moisture from condensing at all.
Other Detectors
Your eye is the principal light detector for any telescope. For most amateur astronomers, this is the only detector that they will ever need. You might want to take photographs of what you see, however, and you can do that with conventional lens and film cameras or with CCD devices/digital cameras. Some astronomers use their telescopes to make scientific measurements with photometers (devices to measure the intensity of light) or spectroscopes (devices to measure the wavelengths and intensities of light from an object).
Advertisement
Make Your Own Telescope
Many amateurs prefer to make their own telescopes. Some people enjoy the time spent grinding mirrors or lenses, cutting the tube, mounting the optics, and making the mounts. There is a certain pride and satisfaction in using an instrument that you have built yourself. If you do not want to grind your own optical parts, many pieces (objective lenses, primary and secondary mirrors) are available commercially -- all you have to do is assemble them according to the design that you wish to make. There are networks of amateur telescope makers and plenty of designs and advice available.
Regardless of whether you make your telescope yourself or buy it, the device will give you many hours of enjoying the night sky and all of its wonders.
Advertisement
What They Can Do
Telescopes can bring the night sky closer to you, and make it less mysterious. You don't have to have the most powerful telescope to see incredible detail in some part of the sky. But figuring out what you would like to see is the most important thing you need to settle on before you decide which telescope you want to buy. In this section, we will discuss the various types of observing that you can do with a telescope. Here are some of the celestial objects that you might like to see:
We'll discuss these and others, and give you an idea of what you will actually see through a telescope.
Advertisement
To give you an idea of how the objects we discuss will look in a small telescope, I will describe how many of them appear in the 4-inch, rich-field, reflecting telescope that I use for observing.
Then, we'll discuss how they might appear in a larger, more powerful telescope.
Observer's Note
Many beginning or first-time astronomers see pictures in magazines from the Hubble Space Telescope, or large telescopes from various observatories, and think that they will see these quality images in the telescopes that they purchase. When they don't see these quality images, they stop looking. Keep in mind that you will not see "Hubble-quality" images in your amateur telescope; but what you will see will amaze you.
Advertisement
The Moon
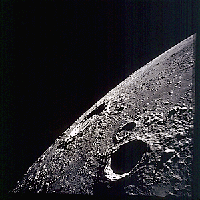
Copernicus crater on the Moon
Photo courtesy of NASA
The moon is the most prominent object in the night sky. It is big, bright, and easy to find. Because the lighting of the moon changes everyday with the changing moon phases, you get a different view of its features everyday. The moon offers much to see and you don't need a huge telescope to reveal its features. With binoculars or a small telescope (2-inch or 50-mm refractor, 4-inch or 100-mm reflector), you can observe:
mountains
craters
maria, or "seas"
terminator - the line between dark and light, where you can see the greatest contrast
The moon is well known, so you can readily find maps or images of the moon, whether online or in periodicals or textbooks, to help you identify features that you observe. A large aperture telescope (6- to 10-inch / 15- to 25-cm) will reveal close-up images of these features. It is even possible, using your own observations or other images, to measure the heights of lunar mountains.
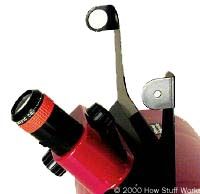
Contrary to popular belief, the best time to observe the moon is not during a full moon, but rather when the moon is between the last quarter and first quarter, because the sun shines at an angle to the lunar features and provides good relief. Sometimes, it is helpful to use a moon filter to enhance the contrast of the views and bring out details. Also, if the light is too bright and you have a reflecting telescope, you can reduce the amount of light and enhance the contrast by placing your hand, with your fingers spread apart, in front of the telescope's tube.
It is often rewarding to view the moon during a lunar eclipse, when you can see the Earth's shadow slowly creep across the lunar features. You can find out when lunar eclipses will occur using the U.S. Naval Observatory's Lunar Eclipse Computer.
Lunar eclipse over Merritt Island, Florida
Photo courtesy of NASA
Finally, the moon is a great target for astrophotography. You can photograph the moon using a telephoto lens or by hooking a camera to your telescope.
The Sun
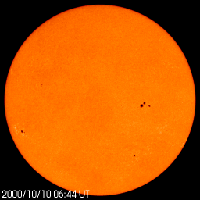
Our sun
Courtesy SOHO consortium
The sun is our nearest star. Like the moon, the sun is big, bright, and can be observed easily with a telescope, provided that you take the proper safety precautions. In fact, observing the sun is one of the few astronomical projects that you can do during the day.
The easiest features to observe on the sun are sunspots, magnetic storms on the sun. You can observe sunspots whether you are projecting the sun's image or using a proper solar filter. You can make drawings of sunspots and note their movement across the solar disc. From this information, you can estimate the speed of the sun's rotation. Another popular activity is counting sunspots and keeping track of their activity -- sunspot activity changes over the 11-year solar cycle.
If you are viewing the sun with a proper filter, you can see the limb darkening effect. This is an effect in which the edge of the sun appears slightly darker than the inner portions, because you are looking through a thicker portion of the sun's atmosphere toward the edge than toward the middle.
If observing conditions are good, and you've got a little luck, you may see the bubbles or granulations of the sun's surface. You may also catch small bright areas around a sunspot group called faculae, which are elevated regions of hot gases. Finally, if you are very lucky, you could catch a glimpse of a solar flare if you observe a sunspot group near the sun's edge.
A rare solar sight is that of a solar eclipse, when the moon passes between the Earth and the sun and blocks out the sun's disc. During a solar eclipse is the only time that you can see the sun's corona. In fact, many amateur astronomers become so obsessed with viewing solar eclipses that they chase them around the world. Click here for a list of upcoming solar and lunar eclipses and their locations.
Note -- When observing the sun through a telescope, heat will build up inside the tube. This heat can damage the telescope's optical parts. To prevent this, turn the telescope away periodically to allow it to cool. Some observers have a separate small telescope that they use exclusively for solar observing.
Never Look Directly at the Sun Through a Telescope!
The intense light from the sun, when magnified by a telescope, can fry the retinas of your eye in less than a second. The only safe ways to observe the sun are indirectly by projection or by the use of a solar filter that fits over the front end of telescope's tube. Click here for details on OBSERVING THE SUN SAFELY!
The Planets
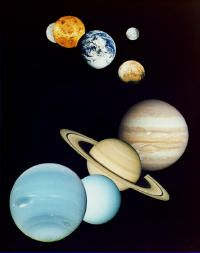
Solar system mosaic
Photo courtesy NASA
You will find views of the planets through a telescope quite satisfying, and they will keep you coming back for more. You can also observe planets from urban areas, where there may be moderate to substantial light pollution. With a small telescope (2-inch or 60-mm refractor, 4-inch or 100-mm reflector), you can see some details on the surfaces of planets, but a larger telescope (3- to 4-inch or 75- to 100-mm refractor, 6- to 10-inch or 15- to 25-cm reflector) will reveal better detail. Generally, refractors provide crisper images of planets, but lack the light gathering ability of reflectors. Regardless of which type of telescope you use, observing planets requires good seeing conditions -- steady, dry atmosphere with little or no clouds -- and you should cool your telescope to the outside temperature for about 30 minutes before observing. Cooling the telescope reduces air currents inside the tube that could produce fuzzy, blurring images.
Venus
You won't see any surface detail on Venus because it is covered with clouds. You can find something interesting to look at, though, because Venus has phases just like the moon, and you can easily see these phases with any telescope. Also, Venus is one of the brightest objects in the sky, and you can find it easily. Usually, Venus can be seen above the horizon before or after sunset; you can see it referred to in newspapers as "the morning star" or "the evening star."
Mars
Mars is a difficult but challenging target, because of its distance and small size. In my 4-inch (100-mm) rich-field, reflecting telescope, I can see a small red disc with no surface detail. In an 8- to 10-inch (20- to 25-cm) reflector, you could probably see the polar ice caps and some dark surface features ("canals") depending upon the seeing conditions. However, the face of Mars is constantly changing. Using filters may help to enhance the viewing somewhat.
This is about the size of the image of Jupiter in my telescope.
Photo courtesy of NASA
Jupiter
Jupiter is one of the prettiest sights in a small telescope. It is the largest planet in our solar system, and you can find it easily. In my 4-inch reflector, I can see Jupiter as a small, bright yellow disc, usually with two brown cloud bands on either side of its equator. In a larger telescope (8- to 10-inch / 20- to 25-cm reflector), you could see more cloud bands and the Great Red Spot.
You can also see the moons of Jupiter (Galilean satellites) -- Io, Europa, Callisto and Ganymede. The moons orbit Jupiter in changing positions each night, and they are interesting to watch over the course of many days. In a large telescope (8- to 10-inch or 20- to 25-cm reflector), you can even watch the shadow of a moon cross the disc of Jupiter!
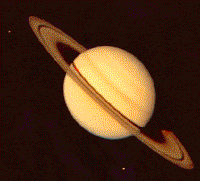
This is about the size of the image of Saturn in my telescope.
Photo courtesy of NASA
Saturn
Saturn is a favorite object for a telescope because of its rings. The rings of Saturn change their angle as seen from Earth as Saturn orbits the sun. So sometimes the rings are highly visible, while other times you cannot see them at all (viewed edge-on). Saturn is a bright object that you can easily find. In my telescope, Saturn appears as a small, bright yellow ball with the rings around it. I cannot see any surface detail, or the gap between the rings called the Cassini division. These features would probably be visible in a larger telescope.
Like Jupiter, Saturn has several moons -- Titan, Iapetus, Phoebe -- that change position. I have a difficult time seeing Saturn's moons in my telescope, although I may be able to see one of them on a good night. However, a larger telescope would probably reveal them much better.
Uranus, Neptune and Pluto
Because of their great distance from Earth, these planets are difficult to locate, a challenge for any observer. I have never had any luck locating them with my telescope, and I probably would not have seen much more than a tiny disc if I did. In a larger telescope, it is likely that these planets would still only appear as small discs.
Asteroid 951 Gaspra
Photo courtesy NASA
Asteroids
Like the outer planets, asteroids are difficult to see in small telescopes. Because they are so small, they appear in a telescope as points of light, like stars. Typically, to locate an asteroid, you find its position from a chart and then look at the field of stars. The asteroid will be a bright object that looks out of place when compared to the chart. If you look at the same field on successive nights, the asteroid will be the object that moves in the field. Finding these objects takes patience! Some advanced observers will measure the light intensities of asteroids over time, using photometers or CCD/digital cameras attached to the telescopes. You can use the changes in the light intensities to calculate the rate of the asteroid's rotation.
Comets and Meteors
Comet Kohoutek
Photo courtesy of NASA
A comet or a meteor streaking across the sky is an exciting sight for anyone, and a telescope can make these objects even more fascinating to watch.
Comets
Comets are brief visitors from the outer solar system. They change brightness and develop tails as they pass close to the sun. The views of comets in telescopes vary dramatically with each comet. Comet Hale-Bopp was a spectacular image in my small telescope. I could see some of the nucleus, the coma and the dust tail. And comet Hyakutake had a similar view. However, not all comets brighten or develop enough to reveal good images in small telescopes. Many observers were disappointed in the showings of comets Kohoutek and Halley in the 1980s. Many amateur astronomers search for comets with binoculars or a small telescope and a great deal of patience.
Meteors
Meteors are debris (dust, rocks) that float about the solar system. These objects travel through the solar system at thousands of miles or kilometers per hour and, when they strike our atmosphere, they burn up because of friction. When a meteor burns up, it leaves a short-lived, long streak across the sky. If a meteor makes it through the atmosphere and lands on Earth, it is called a meteorite. The Earth can encounter meteors alone (sporadic) or in large numbers (showers). Meteor showers are associated with debris from comets, and they occur annually at various times. Meteor showers are named for the constellations from which they appear (such as the Perseids, Orionids and Leonids). Typically, meteors occur too fast to be seen with a telescope. The best way to see meteor showers is with the naked eye and/or binoculars in a dark sky where there are no city lights. Meteor counts are a typical amateur astronomy project. A good meteor shower is a wonder to observe -- some showers can consist of up to a hundred meteors an hour!
Deep-Sky Objects
The Pleiades
Courtesy of NASA
Deep-sky objects include multiple stars, variable stars, star clusters, nebulae and galaxies. A catalog of more than 100 deep-sky objects that you can see in a small telescope was compiled by Charles Messier in the 1700s. Messier objects are designated with a capital M followed by a number (e.g. M31, M41). They are often faint, fuzzy patches of light in any telescope. The key to observing most deep-sky objects is a dark sky (little or no light pollution) and a large telescope (greater than 6-inch or 15-cm aperture). However, some deep-sky objects can be seen in small telescopes like mine. Also, light pollution filters may help improve the view of some of these objects.
Multiple Stars
Many stars are actually arrangements of two or more stars that orbit each other. For example, if you look at Mizar (the middle star of the Big Dipper's handle) in a small telescope, you will see two stars. The same is true for Albireo (Beta Cygni). The stars that form the trapezium in the middle of the Orion Nebula (M42) are part of a four-star system. The stars in multiple star systems may be different sizes, brightnesses and colors. One challenge to an amateur astronomer is to "split" a multiple star system -- be able to resolve the star system into the individual stars using appropriate magnification.
Variable Stars
Some stars periodically brighten and dim as you observe them over time; these stars are called variable stars. Variable stars can include:
eclipsing binary stars - one member star passes in front of the other (the star Algol in the constellation Perseus brightens and dims every few days)
Cepheid variables - these stars change brightness due to changes in their interior
long-period (Mira) variables - these stars change brightness over the course of months
cataclysmic variables - these include explosive events such as novas and supernovas
Many variable stars can be observed with small telescopes, and their light intensities estimated by comparing them to stars of known magnitude. Variable star observing is one area in which amateurs can contribute greatly to the science of astronomy, because professional astronomers do not have the time necessary for such observations. See the American Association of Variable Star Observers (AAVSO) for details.
Star Clusters
Star clusters are close associations of thousands of stars or more. They can be open clusters or globular clusters. Star clusters offer spectacular views in a small telescope. One example is the Pleiades in the constellation Taurus (at right). The Pleiades has seven bright stars that can be seen with the naked eye; but when viewed in a small telescope like mine, many thousands jump out at you.
The Orion nebula (M42)
Courtesy of NASA and Space Telescope Science Institute. Credit: NASA, C.R. O'Dell and S.K. Wong (Rice University)
Nebulae
Nebulae are clouds of gas and dust in interstellar space. One of my favorite nebulae is the Great Nebula in the constellation Orion (M42). It is easily seen with the naked eye as Orion's sword. It has a large gas and dust cloud, with an inner triangle of stars called the Trapezium. I can see the gas, but not with the detail of the Hubble image shown here. No amateur telescope has that degree of detail. The Orion nebula is an emission nebula, in that it emits light, as opposed to an absorption or dark nebula, which absorbs light (e.g. Horsehead Nebula, also in Orion). Some nebulae, such as the Horsehead, are a real challenge to find and observe.
Nebulae are best viewed under low magnification, and rich-field telescopes can provide good views. Large aperture telescopes can gather enough light to produce bright images, and light pollution filters may help you to see details within nebulae, especially for urban/suburban astronomers. Nebulae are favorite targets for astrophotographers.
Galaxies
Galaxies are massive systems of stars held together by gravity. They can be alone, but are mostly found in clusters. One galaxy, the Andromeda galaxy (M31), can be seen with the naked eye. In the Southern Hemisphere, the Large and Small Magellanic Clouds are satellite galaxies that orbit our galaxy, the Milky Way. Galaxies come in many shapes and sizes:
Spiral galaxy
Courtesy of NASA
spiral (M31 in Andromeda)
elliptical (M87 in Virgo)
barred, spiral (NGC 1530 in Camelopardalis)
irregular (the Magellanic Clouds, M82 in Ursa Major)
In a small telescope like mine, galaxies appear as faint, fuzzy patches. I can see M31 in Andromeda as an angled disc. To see fine detail in galaxies, including lanes of dust across them, you need a large aperture (8 to 10 inches or greater) telescope. Dark skies are essential for observing most galaxies. Like nebulae, galaxies are a favorite target for astrophotographers.
Astrophotography
Astrophotography is a favorite pastime of many amateur astronomers, but it requires much patience. Astrophotography can be done with conventional film cameras (35 mm), special cameras (Schmidt cameras), or CCD/digital cameras. In fact, a current area of debate seems to be conventional film astrophotographers versus digital astrophotographers. Each type has advantages and disadvantages; for information on these, see the links section.
There are several ways to do astrophotography:
Using a camera (with or without a telephoto lens) mounted to a movable "Scotch mount" on a tripod.
Using a camera (with or without a telephoto lens) "piggybacked" on a telescope (the telescope is used as a guiding lens).
Using a camera mounted to a telescope (the telescope acts as the camera lens).
Here are some basic pieces of equipment needed for astrophotography:
An equatorial telescope mount to track the motion of the object. Some film exposures require you to track an object for up to an hour.
A photographic "T" mount to attach the camera to the eyepiece holder.
A shutter cable, if you use a 35-mm camera (manual mode).
A guiding eyepiece with an illuminated reticle, to keep the target in the center of the field as it moves.
Large aperture reflecting telescopes tend to be a favorite of astrophotographers for their light gathering ability.
Astrophotography requires much dedication, but it can be incredibly rewarding to review and display your own work. Also, photographs can be used to gain scientific information about astronomical objects. See the links section for further details on astrophotography.
This has only been a brief overview of the projects you can undertake with your telescope. Again, what you plan to observe will be one of the most important factors in your choice of telescope. Whether you are a casual observer who simply appreciates the beauty of the heavens, or a serious, science-oriented observer, the night sky has plenty to offer.
On the next page, we'll learn about some common telescope features.
Telescope Features
Once you have decided that you want to buy a telescope, you will have many types to choose from, falling into many price ranges. First, we'll find out what type of telescope you need. Then we'll talk about the many features you'll be considering:
Optical features -- how the telescope captures and focuses light. (You'll find out why magnification ratings can be misleading!)
Nonoptical features -- the hardware that is used to focus light can reveal the difference between a cheaper model and a more expensive one.
Mounts
Eyepieces
Finders
Star diagonals and erecting prisms
Filters
Practical considerations such as portability, maintenance, storage and price ranges.
Other accessories, including the equipment you might use to take photos with your telescope.
What Type of Telescope Do I Need?
The type of telescope that you need depends mostly on the observing you want to do. Many amateur astronomers own more than one telescope, each specialized for a different type of observing. But if you are a beginner, you might want to look for a telescope that you can use for several different activities.
Remember that there are three basic types of telescopes:
Refractors - a lens is the primary device for gathering light.
Reflectors - a mirror is the primary device for gathering light.
Compound telescopes or catadioptrics - a combination of lenses and mirrors is used to gather light.
Each type has advantages and disadvantages with respect to optical quality, mechanical performance, maintenance, ease of use and price.
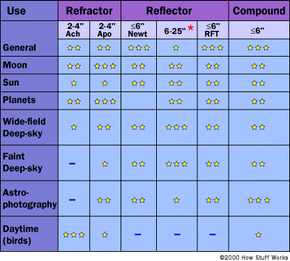
To help with matching the telescope type to the type of observing you plan to do, we have prepared a table that relates the design and aperture to the observing use (moon, planets, deep-sky, etc.).
Generally, refractors are good for lunar and planetary observing, while reflectors are good for deep-sky observing. Compound telescopes are good general observing instruments.
You should also consider where you will do most of your observing:
light-polluted urban skies - compound telescopes and refractors tend to do better than reflectors.
moderately light-polluted suburban skies - all types tend to be equal.
dark, rural skies - compound telescopes and reflectors tend to be slightly better than refractors because they are better able to collect light.
Optical Features
The telescope's ability to collect light is directly related to the optics that are used. Telescopes with poor quality optics can be very frustrating to use. Here are some optical considerations to think about when buying a telescope:
Aperture
Magnification
Focal length
Focal ratio (f/number)
Wave number
Resolution
Aperture
The telescope's ability to collect light is directly related to the size (diameter) of the objective lens or primary mirror. Generally, the bigger the lens or mirror, the more light the telescope collects and brings to focus, and the brighter the final image. Aperture is probably the most important consideration when buying a telescope, but it is not the only consideration. You want to try to purchase as much aperture as you can reasonably afford; however, you should also consider other factors that will be discussed below, including size, weight, storage space and portability. The biggest telescope is not always the best one for you!
Magnification
This consideration is perhaps the most misleading to novice telescope buyers. Often, manufacturers of "cheap, department store" telescopes will display "200x power or more" on the boxes of their products. The magnification or power has little to do with the optical performance of the telescope, and is not a primary consideration. The telescope's ability to enlarge an image (magnification) depends upon the combination of the lenses used, usually a long focal length objective lens or primary mirror in combination with a short focal length eyepiece. As the magnification of an image increases, the field of view and the brightness of the image decrease. A general rule about magnification is that the telescope's maximum magnification is 40x to 60x (average = 50x) per inch of aperture. Since any magnification can be achieved for almost any telescope by using different eyepieces, aperture becomes a more important feature than magnification. Furthermore, most astronomical objects are best viewed on a low magnification or power to gather the most light possible.
Focal Length
Focal length is the distance required by the objective lens or primary mirror to bring all of the light collected to one point (the focus or focal point). The focal length of the lens or mirror is usually printed somewhere on the telescope's tube; if not, it should be found in the instructions or on the box. The focal length is an important number to know. As discussed above, magnification depends upon the focal length of the objective lens or primary mirror and the focal length of the eyepiece. Generally, long focal length telescopes are capable of delivering higher magnifications than short focal lengths. However, do not mistake the length of the telescope tube for the focal length, because compound telescopes have a folded light path, which delivers a long focal length in a short tube.
Focal Ratio (f/number)
Focal ratio or f/number relates to the brightness of the image and the width of the field of view. The focal ratio is the focal length of the objective lens or primary mirror divided by the aperture. The focal ratio concept comes from the camera world, where a small focal ratio means a short exposure time for the film, and was said to be "fast." Although the same is true for a telescope, if a "fast" and a "slow" telescope are compared at the same magnification for visual rather than photographic viewing, then both telescopes will have the same quality image. Generally, the following information about focal ratios can be helpful:
f/10 or higher - good for observing the moon, planets and double stars (high power)
f/8 - good for all-around viewing
f/6 or lower - good for viewing deep-sky objects (low power)
Wave Number or Wave Error
No glass lens or mirror is perfect! The wave number or wave error is an indication of how well the mirror or lens was ground compared to an ideal surface. This number is probably listed in the instrument's specifications, somewhere in the instructions (it is never prominently displayed, so you may have to ask the dealer or manufacturer). Wave numbers are expressed as fractions of a wavelength. The smaller the wave number, the better the mirror or lens. While the absolute minimum acceptable wave number is one-fourth, good telescopes generally have wave numbers of one-eighth or less. Also, the overall performance of the telescope is an accumulation of the wave errors of each optical component. For example, a telescope with two mirrors (each with a one-eighth wave number) will have an overall wave error of one-fourth.
Resolution
The ability to see fine detail in an image of the moon, a planet or a double star depends upon how well the telescope can separate, or resolve, two close objects. Resolution depends upon the aperture of the telescope, the quality of the optics, and the observing conditions (e.g. light-polluted vs. dark, dry vs. humid atmosphere). Generally, the ideal limit, also called the Dawes limit (arc-seconds), is 4.46/aperture in inches or 116/aperture in millimeters.
Make a Simple Telescope
Get two magnifying glasses (it works best if one is larger than the other) and a sheet of printed paper.
Hold one magnifying glass (the bigger one) between you and the paper. The image of the print will look blurry.
Place the second magnifying glass between your eye and the first magnifying glass.
Move the second glass forward or backward until the print comes into sharp focus. You will notice that the print appears larger and upside down.
Non-Optical Features
There are other parts of a telescope, besides the optical components, that you'll want to consider:
Eyepiece Holder
Eyepieces come in three diameters -- 0.965 inches (2.45 cm), 1.25 inches (3.18 cm), and 2 inches (5.08 cm). However, the eyepiece holder in your telescope is fixed. The "cheap, department store" telescopes tend to have 0.965-inch holders. Most telescopes have 1.25-inch holders. Some have 2-inch holders. Eyepieces of differing diameters are not usable in all telescopes. Make sure that the eyepiece holder in your telescope can support the eyepieces you wish to purchase. You typically do not have an option on the size (i.e. the manufacturer sets the size with the telescope model), but you should definitely know what it is because it will affect other choices you'll be making.
Focuser
The focuser moves the eyepiece holder up and down slightly, adjusting the focus of the eyepiece for each individual observer. There are friction focusers or rack-and-pinion focusers. Regardless of the type on your telescope, your focuser should move smoothly without causing the telescope to shake. If it does not move smoothly, then when you have to focus the eyepiece (change eyepieces, or when someone else looks in the telescope), the object is likely to move out of the field of view, especially at high magnification. You may not have the choice of focuser on your telescope, but it is nonetheless helpful to know.
Telescope Mounts
The type of mount that you use will depend upon your observing needs. The two types are alt-azimuth and equatorial. Alt-azimuth mounts are simpler, easy to use, and cheaper than equatorial mounts. You set the horizontal and vertical coordinates of the object when sighting it, and then lock it in. You must readjust the horizontal and vertical coordinates as the object moves out of the field of view due to the Earth's rotation.
In contrast, equatorial mounts are more complicated, require some set-up, and are more expensive than alt-azimuth mounts. Equatorial mounts must be aligned with the Earth's poles. They often have counterweights to balance the weight of the telescope. Once the mount is aligned with the poles, you can set the coordinates of the target object (right ascension, declination). An equatorial mount will track an object's motion across the sky, and makes it easier to keep an object in the field of view. If you wish to do astrophotography, an equatorial mount is necessary.
Both mounts can come with slow motion controls, which help you make small movements of the mount to keep an object in the field of view (optional). Equatorial mounts may also have the following options:
setting circles - help you locate an object by dialing its coordinates (right ascension, declination)
Regardless of the type of mount that you use, the most important thing is its stability. It should have a low center of mass and be able to support the weight of the telescope adequately. It should not vibrate when you touch it lightly. Finally, it should place the telescope at a comfortable height for you whether you decide to stand or sit.
Mounts can range in price from $150 to $2,000 depending upon the type and options.
Eyepieces
Schematic diagrams of various eyepieces
Next to the telescope itself and the mount, the eyepieces will be your most important purchase. Most telescopes come with one eyepiece (low power), some telescopes come with none. Therefore, you may have to purchase eyepieces so that you can vary the magnification of your telescope.
Eyepieces come in many designs:
Huygens
Ramsden
Orthoscopic
Kellner and RKE
Erfle
Plossl
Nagler
Barlow (used in combination with another eyepiece to increase magnification 2 to 3 times)
The designs vary in terms of the number and types of lenses, or elements, they use. Eyepieces should be evaluated for the following:
optical quality
field size
brightness
sharpness
lack of aberrations (chromatic aberrations, ghost images)
eye relief (distance from focal point, your eye, to the lens -- especially important for eyeglass wearers)
barrel size - 0.965 inches, 1.25 inches, 2 inches
price
Huygens and Ramsden eyepieces are the oldest designs. They suffer from chromatic aberrations and are often included with "cheap, department store" telescopes.
Orthoscopic eyepieces were invented by Ernst Abbe in 1880. They have four elements, and a 45-degree apparent field of view, which is somewhat narrow. The optical design gives a crisp view, has a good eye relief, and is considered excellent for planetary viewing. Orthoscopic eyepieces can range from $50 to $100 each.
Kellner and RKE (RKE is Edmund Scientific's patented modification of Kellner) are three-element designs that produce images in a 40-degree field of view, and they have some chromatic aberration. They have good eye relief. Kellners work best in long focal length telescopes. They are a good balance between performance and economy, varying from $30 to $50 each.
Set of RKE eyepieces
Erfle eyepieces were invented during World War II. They have a five-element design and a wide field of view (60 degrees). They suffer from ghost images and astigmatism, which makes them unsuitable for planetary viewing. Improvements on the Erfle design are called wide-field eyepieces. They can range from $50 to $300 each.
Plossl eyepieces have a four- or five-element design with a 50 degree field of view. They have good eye relief (except for 10-mm and shorter lenses). They work best in the 15- to 30-mm size. The quality is good especially for planetary viewing. They have some astigmatism, especially at the edge of the field. They are popular eyepieces and range from $50 to $150 each.
Nagler eyepieces were introduced in 1982, advertised as "like taking a spacewalk." They have a seven-element design with an incredible 82 degree field of view. They come in 2-inch barrel size only, are heavy (up to 2 pounds / 1 kg) and expensive ($150 to $400 each).
Barlow lenses can be an economical way to increase magnification and/or provide better eye relief with an existing eyepiece. The eyepiece fits into the Barlow lens, which then fits into the eyepiece holder. A Barlow lens can range from $30 to $70.
One final category of eyepieces are those with illuminated reticles. They come in many designs, and are used exclusively for astrophotography. They aid in guiding the telescope to track an object during a film exposure, which can take anywhere from 10 minutes to an hour. They can range from $100 to $200 dollars each.
Finders
Finders are devices that help aim the telescope at its target, similar to the sights on a rifle. Some finders come standard on telescopes, while others are sold separately. Finders can come in three basic types:
Peep sights - notches or circles that allow you to line up the target
Reflex sights - a mirror box that shows the sky and illuminates the target with a red LED diode spot, similar to a laser sight on a gun
Telescope sight - a small low magnification (5x to 10x) telescope mounted on the side with a cross hair reticle, like a telescopic sight on a rifle
Peep sights are inexpensive, but tend to be less precise for finding objects. Reflex sights do not magnify objects, but rather present a naked-eye view of the sky. They have become popular because they are easy to use and vary in price from $40 to $60. Telescope sights magnify the sky, but present an upside-down image, which can make them difficult to use. They come in one- or two-ringed sights (the rings are used for aligning the sight with the telescope). When given the choice, take the two-ring sight. Telescope sights can range from $15 to $50.
Star Diagonals and Erecting Prisms
When you look at an object high in the sky (near Zenith), the eyepiece is facing down toward the ground. If you looked through the eyepiece directly, your neck would be bent at an uncomfortable angle. So, a 45-degree mirror called a star diagonal is used to deflect the image into an eyepiece, making the viewing angle more comfortable. Star diagonals can range from $40 to $90.
Telescopes and eyepieces turn an image upside-down. This is not a problem when observing astronomical objects, but is rather annoying for terrestrial observations like bird watching. To correct this, an erecting prism or Porro prism, either straight through or angled, is used to turn the image right side-up. These prisms can range from $25 to $70.
Filters
This is a set of filters for viewing, including a light pollution filter (left) and colored filters for enhancing contrast in planetary images.
Filters are pieces of glass or plastic that you place in the barrel of an eyepiece to restrict the wavelengths of light that come through in the image. Filters can be used to :
enhance the viewing of faint sky objects in light polluted skies
enhance the contrast of fine features and details on the moon and planets
Light pollution filters are valuable for moderate to severely light-polluted skies. They come in broad-band and narrow-band varieties, and can range from $40 to $150. Color and polarizing filters are useful for bringing out details in the moon and planets. They are often available in sets, and can cost from $15 to $30 each. Solar filters are for solar observing, fitting over the end of a telescope to block most of the light from the sun. They are made of aluminum or Mylar, and can cost from $50 to $200.
Practical Considerations
New York City at night
Photo courtesy NASA
There are practical matters involved when purchasing a telescope. To get the most out of your purchase, these factors should also be considered:
Portability
Maintenance
Storage space
Price
Portability
Areas of dark skies are decreasing across the United States, as demonstrated by this view of New York City at night. If you are an urban astronomer, odds are that you will have to move your telescope to a site several miles away that has moderate-to-dark skies. If so, you need to make sure that it is light enough to carry in and out of your home and car, and that it will fit inside your car or van. Finally, you may want a telescope that needs minimal assembly (optics, mount) when you reach your observing site -- trying to assemble a telescope mount in the dark can be extremely frustrating.
Maintenance
Some telescopes, like reflectors, require periodic maintenance. The most common maintenance with reflectors is keeping the mirrors aligned, or collimated. This can be a simple or complicated procedure, depending upon the individual telescope. Sometimes, especially with open-ended or completely open telescopes, dust may enter the tube and settle on the primary or secondary mirrors; these mirrors may have to be cleaned and re-aligned. Finally, mirror surfaces can degrade with time, and may require re-aluminizing or replacement.
Storage
When not in use, telescopes must be stored somewhere. This can be a definite problem with a large aperture telescope like a 10-inch Dobsonian reflector. You want to find a place with sufficient room, that is as dust-free and moisture-free as possible. Store the telescope covered to prevent dirt and dust from getting into it.
Price
Telescopes vary widely in price. They can range from a few hundred dollars to several thousand dollars, depending upon the type:
small Newtonian reflectors (6-inch aperture or less) - $250 to $1,000
achromatic refractors (2- to 3-inch aperture) - $250 to $1,000
large Dobsonian reflectors (6- to 18-inch aperture) - $300 to $2,000
compound telescopes (6- to 11-inch aperture) - $1,000 to $3,000
apochromatic refractors (3- to 5-inch aperture) - $2,000 to $10,000
You can also consider price per unit aperture, and they would rate from high to low as follows:
No matter how good the telescope quality is, you probably won't enjoy it if you have to bankrupt your savings or remortgage your house to pay for it.
You will have to purchase other things to complete your observing equipment (eyepieces, finders, filters).
Generally, you should buy as much aperture as you can reasonably afford. But for most observers, the following sizes will be more than sufficient:
Refractors: 3 inches / 80 millimeters
Reflectors: 4 to 8 inches / 10 to 20 centimeters
Compound telescopes: 6 to 8 inches / 16 to 20 centimeters
Other Accessories
Dew Caps
Because you will observe during the night, when it is probably cooler, moisture can condense in your telescope and on the optics, which is more of a concern if you have a telescope with an open tube. To prevent this, you can use a dew shield, which wraps around the front end of the telescope. The shield extends the length of the tube and allows moisture to condense on the inside of the shield, rather than in the tube. Some shields can be heated to prevent moisture from condensing at all. Dew caps can range from $30 to $100. Heaters, which are usually powered by 12-volt DC batteries, consist of electrical heating strips or hand-held, "blow gun" dryers (like portable hair dryers). Heaters can range from $15 to $50 (battery not included).
Observing Table and Chair
Astronomers carry many things with them (eyepieces, filters, star charts, red flashlights, field guide, etc.). It is often helpful to have a level surface on which to lay these things out. Many astronomers will carry a folding card table or tray table. Astronomy suppliers have made special tables with non-slip surfaces that roll up compactly for storing in a car's trunk. These tables cost around $50.
During a long night's observing, you can be uncomfortable standing all of the time. When looking at objects high in the sky, a refractor's eyepiece end is low to the ground. So you may need a chair, such as a folding chair or folding camper's chair. Again, astronomy suppliers have made special observing chairs and stools that fold up and are adjustable. They can range from $40 to $150.
Astrophotography Accessories
Astrophotography is a favorite pastime of many amateur astronomers. Photographs of deep-sky objects, the moon and planets can be taken with conventional film cameras, CCD devices/digital cameras, and even video camcorders. Photography can be done without a telescope, with the camera "piggybacked" onto the telescope (i.e. telescope is used to guide the camera) or with the telescope as the camera's lens (prime focus photography). If you wish to do astrophotography using prime focus photography, you will need the following:
35-mm camera (with manual capability), video camcorder, or CCD device/digital camera
The camera or CCD device acquires the image -- CCD cameras for astronomy can range from $500 to $10,000. The camera or T-adapter ($25 to $80) hooks the camera to the telescope's eyepiece holder. The off-axis guider is a combination camera adapter and eyepiece holder, allowing you to guide the telescope's movement with the object while acquiring the image with the camera. The off-axis guider splits the light coming from the object so that you can look at the object, usually with an illuminated reticle eyepiece, and the camera can capture the light on film/CCD. Off-axis guiders can range from $110 to $150. The laptop or PDA has the software to acquire, display, and store the image; image processing is usually done later, away from the observing site.
In addition to images, amateur astronomers can measure the light from stars using photometers to do various scientific investigations. Photometers, like CCD cameras, can range from $500 to $10,000, depending upon the type.
Look Out!
When purchasing a telescope, there are several things you should keep in mind to avoid buying one that won't meet your needs. Here are some of the most important ones:
Do not be lured by claims of high power magnification on the box or in the ad! This consideration is perhaps the most misleading to novice telescope buyers. Often, manufacturers of "cheap, department store" telescopes will display "200x power or more" on the boxes of their products. The magnification or power has little to do with the optical performance of the telescope, and is not a primary consideration. The telescope's ability to enlarge an image (magnification) depends upon the combination of the lenses used, usually a long focal length objective lens or primary mirror in combination with a short focal length eyepiece. As the magnification of an image increases, the field of view and the brightness of the image decrease. A general rule about magnification is that the telescope's maximum magnification is 40x to 60x (average = 50x) per inch of aperture. Since any magnification can be achieved for almost any telescope by using different eyepieces, aperture becomes a more important feature than magnification. Furthermore, most astronomical objects are best viewed on a low magnification or power to gather the most light possible.
Avoid aperture fever!Aperture is probably the most important consideration when buying a telescope, but it is not the only consideration. You want to purchase as much aperture as you can reasonably afford, but you must also keep in mind other factors such as size, weight, storage space, portability and sky conditions. Big telescopes are heavy to carry, and take up a lot of storage space in your house and your car. The biggest telescope is not always the best one! For most observers, the following aperture sizes will be more than sufficient: refractors: 3 inches / 80 millimeters; reflectors: 4 to 8 inches / 10 to 20 centimeters; compound telescopes: 6 to 8 inches / 16 to 20 centimeters
Check the focuser. The focuser moves the eyepiece holder up and down slightly, adjusting the focus of the eyepiece for each individual observer. There are friction focusers or rack-and-pinion focusers. Regardless of the type on your telescope, your focuser should move smoothly without causing your telescope to shake. If it does not move smoothly, then when you have to focus the eyepiece (change eyepieces, or when someone else looks in the telescope), the object is likely to move out of the field of view, especially at high magnification. You may not have the choice of focuser on your telescope, but it is nonetheless helpful to know.
Does your telescope come with eyepieces? Next to the telescope itself and the mount, the eyepieces will be your most important purchase. Most telescopes come with one eyepiece (low power), some telescopes come with none. Therefore, you may have to purchase eyepieces so that you can vary the magnification of your telescope.
Make sure that your eyepieces fit your telescope's eyepiece holder. Eyepieces come in three diameters: 0.965 inches (2.45 cm), 1.25 inches (3.18 cm), and 2 inches (5.08 cm). However, the eyepiece holder in your telescope is fixed. The "cheap, department store" telescopes tend to have 0.965-inch holders. Most telescopes have 1.25-inch holders. Some have 2-inch holders. Eyepieces of differing diameters are not usable in all telescopes. Make sure that the eyepiece holder in your telescope matches with the eyepieces you wish to purchase. You typically do not have an option on the size (the manufacturer sets the size with the telescope model), but you should know what it is so you can pick out the right eyepieces.
Look for a steady telescope mount. Regardless of the type of mount that you use, the most important thing is its stability. It should have a low center of mass so that it does not tip over easily, and should be able to support the weight of the telescope adequately. It should not vibrate when you touch it lightly. Finally, it should place the telescope at a comfortable height for you, whether you decide to stand or sit.
Do not be tempted to buy the most expensive telescope! Telescopes vary widely in price. They can range from a few hundred to several thousand dollars, depending upon the type. Two things to remember: No matter how good the telescope quality is, you probably won't enjoy it if you have to bankrupt your savings or re-mortgage your house to pay for it. You will have to purchase other things to complete your observing equipment (eyepieces, finders, filters).
FAQ
This is a set of filters for viewing, including a light pollution filter (left) and colored filters for enhancing contrast in planetary images.
What type of telescope should I buy?
The type of telescope you should buy depends on the observing you want to do. Many amateur astronomers own more than one telescope, each specialized for a different type of observing. If you are a beginner, though, you might want to look for a versatile model that will work for several different activities. Each type has advantages and disadvantages with respect to optical quality, mechanical performance, maintenance, ease of use and price. Generally, refractors are good for lunar and planetary observing, while reflectors are good for deep-sky observing. Compound telescopes are good general observing instruments.
How big should my telescope be?
The telescope's ability to collect light is directly related to the size or diameter (aperture) of the objective lens or primary mirror. Generally, the bigger the lens or mirror, the more light the telescope collects and brings to focus, and the brighter the final image. Aperture is probably the most important consideration when buying a telescope, but it is not the only consideration. You want to buy as much aperture as you can reasonably afford; however, avoid "aperture fever." You should also consider other factors like size, weight, storage space, portability and sky conditions. The biggest telescope is not always the best one for you!
How powerful should my telescope be?
This consideration is perhaps the most misleading to novice telescope buyers. Often, manufacturers of "cheap, department store" telescopes will display "200x power or more" on the boxes of their products. The magnification or power has little to do with the optical performance of the telescope, and is not a primary consideration. The telescope's ability to magnify an image depends upon the combination of the lenses used, usually a long focal length objective lens or primary mirror in combination with a short focal length eyepiece. As the magnification of an image increases, the field of view and the brightness of the image decrease. A general rule about magnification is that the telescope's maximum magnification is 40x to 60x (average = 50x) per inch of aperture. Since any magnification can be achieved for almost any telescope by using different eyepieces, aperture becomes a more important feature than magnification. Besides that, most astronomical objects are best viewed on a low magnification or power to gather the most light possible.
What kind of telescope would be good for a child?
Before you buy a telescope for your child, take him or her out skywatching for some time. Let them learn their way around the night sky by identifying the constellations for each season.
Some good telescopes for children:
Small refractors - many children like to see the moon and planets. These telescopes provide good views of these objects.
Rich-field reflectors - these telescopes provide bright, low-power, wide-field images of many types of objects. They are usually easy to aim, and the wide-field view makes them easy to use when searching for objects.
Regardless of the type of telescope that you buy, consider that children should have a lightweight telescope that is easy to carry, set up and use. Consider the following in a mount:
The mount should be not be too high for a child, so he or she can view through the eyepiece while standing.
The mount should be sturdy so that it does not vibrate.
The mount should have a low center of gravity so that it does not tip over easily.
Finally, remember that a child's first telescope need not be the only telescope they will ever use. They should be able to use it by themselves and enjoy it. Later, they can graduate to another, more advanced model.
What is the f-number?
The focal ratio or f/number relates to the brightness of the image and the width of the field of view. The focal ratio is the focal length of the objective lens or primary mirror divided by the aperture. The focal ratio concept comes from the camera world, where a small focal ratio meant a short exposure time for the film, and was said to be "fast." Although the same is true for a telescope, if a "fast" and a "slow" telescope are compared at the same magnification for visual rather than photographic viewing, both telescopes will have the same quality image. Generally, the following information about focal ratios should be considered:
f/10 or higher - good for observing the moon, planets and double stars (high power)
f/8 - good for all-around viewing
f/6 or lower - good for viewing deep-sky objects (low power)
What type of mount should I have for my telescope?
The type of mount that you use will depend upon your observing needs. The two types are alt-azimuth and equatorial. Alt-azimuth mounts are simpler, easy to use and cheaper than equatorial mounts. You set the horizontal and vertical coordinates of the object when sighting it, and then lock it in. You must readjust the horizontal and vertical coordinates as the object moves out of the field of view due to the Earth's rotation.
Equatorial mounts are more complicated, require some set-up, and are more expensive than alt-azimuth mounts. Equatorial mounts must be aligned with the Earth's poles. They often have counterweights to balance the weight of the telescope. Once the mount is aligned with the poles, you can set the coordinates of the target object (right ascension, declination). An equatorial mount will track an object's motion across the sky, and makes it easier to keep an object in the field of view. If you wish to do astrophotography, an equatorial mount is necessary.
How much does a telescope cost?
Telescopes vary widely in price. They can range from a few hundred to several thousand dollars, depending upon the type:
small Newtonian reflectors (6 inches or less aperture) - $250 to $1,000
achromatic refractors (2-3 inch aperture) - $250 to $1,000
large Dobsonian reflectors (6-18 inch apertures) - $300 to $2,000
compound telescopes (6-11 inch aperture) - $1,000 to $3,000
apochromatic refractors (3-5 inch aperture) - $2,000 to $10,000
You can also consider price per unit aperture, and they would rate from high to low as follows:
Generally, you should buy as much aperture as you can reasonably afford. But for most observers, the following sizes should be more than sufficient:
refractors: about 3 inches / 80 millimeters
reflectors: 4 to 8 inches / 10 to 20 centimeters
compound telescopes: 6 to 8 inches / 16 to 20 centimeters
How many eyepieces do I need?
Next to the telescope itself and the mount, the eyepieces will be your most important purchase. Most telescopes come with one eyepiece (low power), but some telescopes come with none. Therefore, you may have to purchase eyepieces so that you can vary the magnification of your telescope.
Eyepieces come in many designs:
Huygens
Ramsden
Orthoscopic
Kellner and RKE
Erfle
Plossl
Nagler
Barlow (used in combination with another eyepiece to increase magnification 2 to 3 times)
See How They Work for a discussion of each type. Generally, you should have a low-power eyepiece, and some intermediate or high-power eyepiece. Remember that the telescope's maximum magnification is 40x to 60x per inch of aperture.
What does a finderscope do?
Finders are devices used to help aim the telescope at its target, similar to the sights on a rifle. Some finders come standard on telescopes, while others are sold separately. Finders can come in three basic types:
peep sights - notches or circles that allow you to line up the target.
reflex sights - a mirror box that shows the sky and illuminates the target with a red LED diode spot similar to a laser sight on a gun.
telescope sight - a small, low magnification (5x to 10x) telescope mounted on the side with a cross hair reticle, like a telescopic sight on a rifle; unlike the other two finders, this type presents an upside-down image to your eye.
A telescope turns the image upside down. Should I buy a device to turn it right-side up?
This is not a problem when observing astronomical objects, but is rather annoying for terrestrial observations like bird-watching. To correct this, an erecting prism or Porro prism, either straight through or angled, is used to turn the image right side-up.
I live in a city with lots of lights. Can I still observe the sky? Yes, you can probably still get good views of the moon and planets from a city park. Try to position your telescope so that trees or buildings can block out major sources of light. You may also want to consider buying a light pollution filter to block the wavelengths of light emitted by street lights.
Can I observe the sun with my telescope?
Yes, but NEVER LOOK DIRECTLY AT THE SUN THROUGH A TELESCOPE! To safely view the sun, you should use a projection system or solar filters that fit over the end of a telescope to block most of the light from the sun. They are made of aluminum. (See Observing the Sun for details).
What does a color filter do for me?
Filters are pieces of glass or plastic that you place in the barrel of an eyepiece to restrict the wavelengths of light that come through in the image. Filters can be used to:
enhance the viewing of faint sky objects in light-polluted skies
enhance the contrast of fine features and details on the moon and planets
What do I need if I want to take pictures of the moon, planets and stars?
Photographs of deep-sky objects, the moon and planets can be taken with conventional film cameras, CCD devices/digital cameras, and even video camcorders. Photography can be done without a telescope, with the camera "piggybacked" onto the telescope (i.e. telescope is used to guide the camera) or with the telescope as the camera's lens (prime focus photography). If you wish to do astrophotography using the prime focus method, you will need the following:
35-mm camera (with manual capability), video camcorder, or CCD device/digital camera
The camera or CCD device acquires the image. The camera or T-adapter hooks the camera to the telescope's eyepiece holder. The off-axis guider is a combination camera adapter and eyepiece holder, letting you guide the telescope's movement with the object while acquiring the image with the camera. The off-axis guider splits the light coming from the object so that you can look at the object, usually with an illuminated reticle eyepiece, and the camera can capture the light on film/CCD. The laptop or PDA has the software to acquire, display and store the image. Image processing is usually done later, away from the observing site.
Besides my telescope, what else do I need for observing?
First of all, dress warmly when you go out at night! When the sun goes down, temperatures fall and moisture condenses. You would be surprised how cold you can feel even on a hot, summer night. I have been observing on summer nights in North Carolina and needed a sweater and jacket even when the outside temperature is 60 degrees Fahrenheit. If you are not comfortable, then you will not enjoy observing.
Next, you will need a red flashlight so that you can see things while keeping your eyes adapted to the dark. If you do not have one, cut a piece of brown paper bag, place it over the end of the light and fasten it with a rubber band.
Typical set of observing supplies.
Other supplies include binoculars for sweeping the skies, filters, star charts, field guides and eyepieces. Finally, do not forget to take a snack and something to drink. You would be surprised at how hungry you can get during hours of observing.
Can I do real science with my telescope?
Yes, many amateur astronomers contribute to the science of astronomy. Amateurs have much more time to spend on the "little things" than professionals do. Also, the price of large aperture telescopes has come down so much over the years that many amateurs now have equipment that rivals the stuff used by professional astronomers. Amateurs can contribute in many areas, such as variable star observing, meteor counting and comet hunting.
Telescope Terms
Here are some common terms associated with telescopes:
concave - lens or mirror that causes light to spread out.
convex - lens or mirror that causes light to come together to a focal point.
field of view - area of the sky that can be seen through the telescope with a given eyepiece.
focal length - distance required by a lens or mirror to bring the light to a focus.
focal point or focus - point at which light from a lens or mirror comes together.
magnification (power) - telescope's focal length divided by the eyepiece's focal length.
resolution - how close two objects can be and yet still be detected as separate objects, usually measured in arc-seconds (this is important for revealing fine details of an object, and is related to the telescope's aperture).