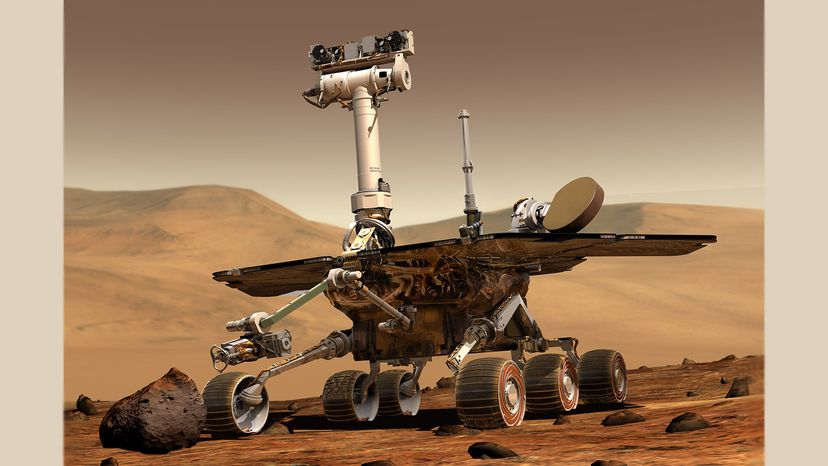
Spirit and Opportunity, it turns out, aren't just words we use to make ourselves feel better when we're depressed. In 2003, NASA launched the cheerfully named Spirit and Opportunity rovers, which embarked on a mission of far greater mobility and distance than Pathfinder.
Both the rovers share a few noteworthy features. They can both generate power from solar panels and store it in internal batteries. Just in case any little green men are nearby, the rovers can take high-resolution color images or bust out magnifying cameras for Earthbound scientists to scrutinize objects.
Multiple spectrometers on the arm of the rovers employ all sorts of tricks to determine the composition of rocks, including tracking how much heat an object is giving off and firing alpha particles at it. Spirit and Opportunity also came equipped with an installed drill (Rock Abrasion Tool) to bore into the planet's surface.
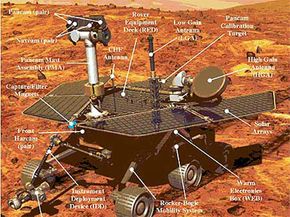
The body of the rover is the warm electronic box (WEB). An equipment deck sits on top of the rover, where the mast (or periscope eye) and cameras reside. The gold-painted walls of the rover's body can withstand minus 140 degrees Fahrenheit (minus 96 degrees Celsius) temperatures.
Inside the WEB of the rover are lithium ion batteries, radios and electronic things like spectrometers, all requiring warmth to function. The brain of the rover is a computer that's comparable to a powerful, high-end laptop but with special memory functions that won't destroy with radiation and shut-offs. The computers also continually check temperatures to ensure a "healthy" rover.
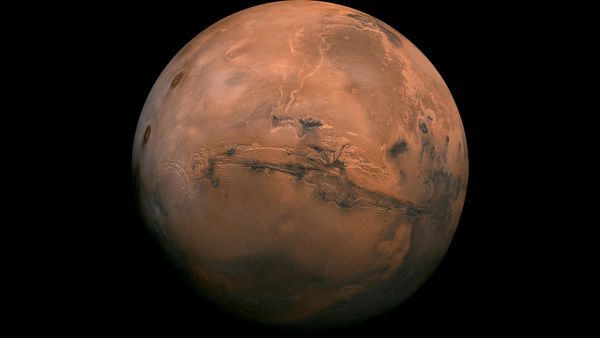
What Spirit and Opportunity found was a credit to the technology that allowed them to explore the Red Planet. Within a couple of months of landing, the Opportunity uncovered evidence of saltwater, which leaves open the possibility that life (and fossil indications) might at one time have existed on the planet. Spirit stumbled across rocks that pointed to an earlier, unrulier Mars that was marked by impacts, explosive volcanism and subsurface water [source: NASA Mars].
Keep Rovin'
Both Spirit and Opportunity are no longer responsive. NASA ended Spirit's mission in 2011, and engineers at the Mission Control at NASA's Jet Propulsion Laboratory (JPL) could not revive Opportunity in 2019.
In six years, Spirit captured 124,838 images and traveled 4.8 miles. Meanwhile, Opportunity was around for more than 14 years, captured 217,594 raw images and traveled 28 miles.